With this project we aimed at building and swinging-up an open-source and affordable cart-pole robot so that everyone could build one at home! What we already did :
- Carefully choose and buy the components (motors, sensors, electronics, …)
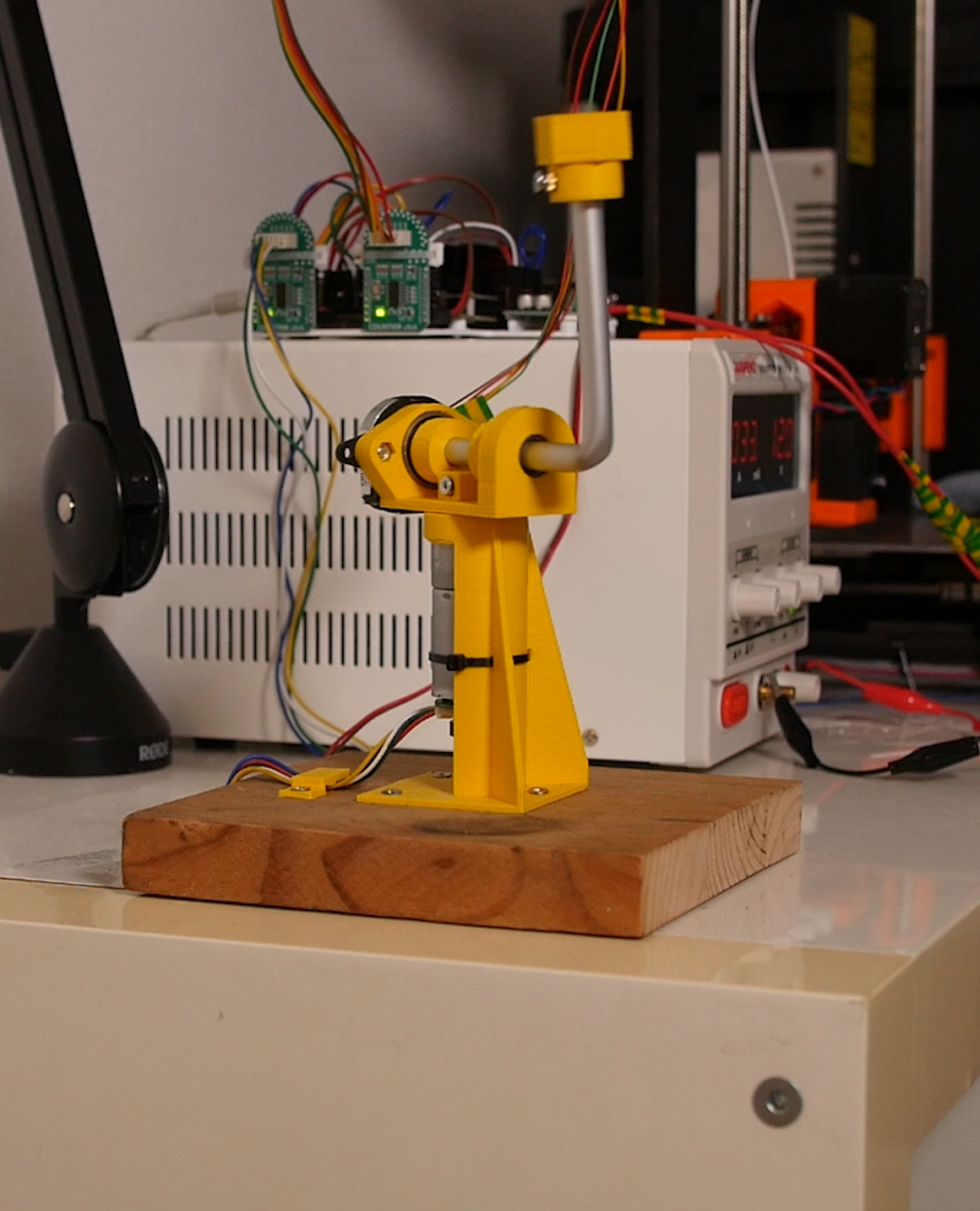
- Design and 3D print the mechanical parts
- Code the firmware on a seeduino
- Code a physical simulation using Pinocchio
- Code a NMPC (Non Linear Model Predictive Controller) using Crocoddyl
- Swing-up the pendulum in simulation
Armand already swang-up the real robot using DRL (Deep Reinforcement Learning) and made a video about it! I still need to swing-up the real robot using NMPC, stay tuned!