Pierre Fabre

I'm a French robotics control engineer currently working as a research engineer at Inria Paris in the Willow team, under the supervision of Justin Carpentier. I will soon start a PhD in Robotics between the Willow team and the Auctus team in Bordeaux. I will be supervised by Justin Carpentier, Vincent Padois and Sébastien Kleff.
In the past, I worked at Wandercraft on the first self-balancing personal exoskeleton and on the Calvin humanoid. I have also interned at Safran as a control engineer intern and at LAAS-CNRS as a control theory research assistant.
I graduated from ISAE-Supaéro, where I had the opportunity to take part in a Mars Analog mission for three weeks in the Utah desert.
I like to solve problems whether it's solving boulder problems in a gym at Arkose or outdoor in the Fontainebleau forest, solving chess puzzles on chess.com or even solving engineering problems for fun projects like the furuta pendulum we built with Armand du Parc.
News
| Apr 29, 2026 | Paper accepted to the Frontier of Optimization for Robotics workshop at ICRA 2026! |
|---|---|
| Mar 19, 2026 | I presented my work on Nonsmooth Optimization at GAMM 2026 in Stuttgart! |
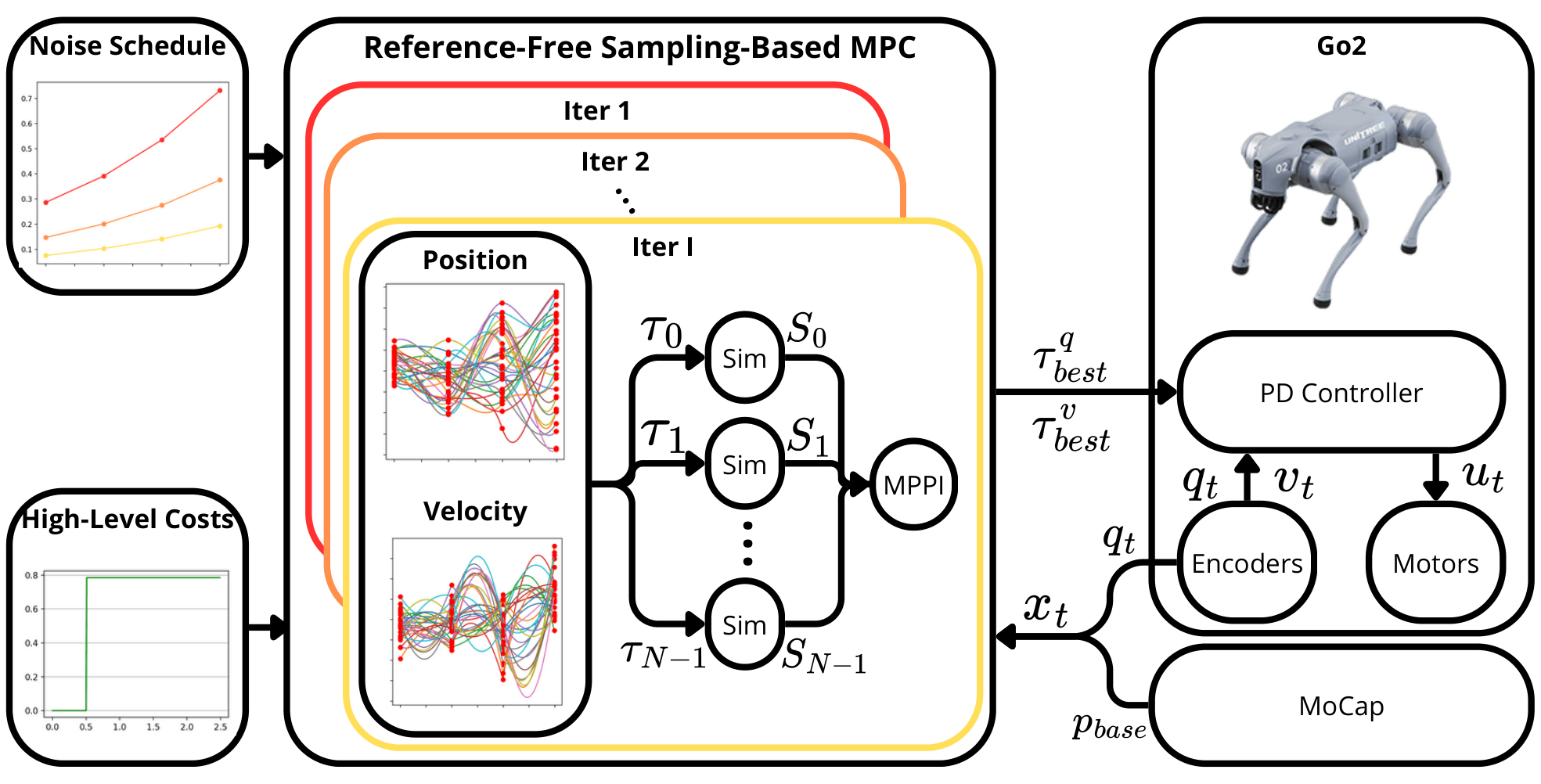
| Jan 31, 2026 | Our paper Reference-Free Sampling based Model Predictive Control has been accepted to ICRA 2026! |
Publications
Projects

Furuta
Build and swing up a furuta pendulum

M.D.R.S.
3 weeks on the red planet